









Hamburg, 12.09.2017 - Auf einer Strecke von gut 700 Metern wird der Fluss Este und der angrenzende Hafen von Buxtehude tiefergelegt. Ziel ist, dass größere Segel- und Traditionsschiffe den Hafen wieder erreichen können, dessen Zufahrt durch eine neue Flachbrücke ansonsten nicht zugänglich wäre. Verantwortlich für die Umsetzung dieses anspruchsvollen Wasserbauprojekts ist das Unternehmen Matthäi Wasserbau GmbH & Co. KG aus Verden. Um eine präzise und nachvollziehbare Tieferlegung des Flussbetts zu erreichen, setzt der Bautrupp um Oberbauleiter Martin Meier und Mitarbeiter René Hackbarth einen Schwimmbagger mit dem 3D-Steuerungssystem X-53i von Topcon ein. Das System besteht aus einem GNSS-Empfänger, Sensoren sowie einem Steuerungsdisplay in der Kabine.
Bauforum24 Artikel (18.08.2017): SmoothRide von Topcon im Einsatz
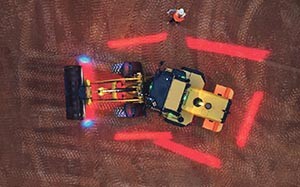
 Im Hintergrund fördert der Schwimmbagger das Sediment vom Flussgrund.
Im Hintergrund fördert der Schwimmbagger das Sediment vom Flussgrund.
Als René Hackbarth und sein Bautrupp den angelieferten Schwimmbagger der 25-Tonnen-Klasse in Empfang nahmen, waren sie schon bestens auf ihr Projekt vorbereitet: Diese Ausbaggerung, in Auftrag gegeben vom Wasserstraßen- und Schifffahrtsamt Hamburg, dient als Ausgleichsmaßnahme – denn wegen der neuen A26-Flachbrücke ist der Hafen seit einiger Zeit nicht mehr für größere Segel- und Traditionsschiffe erreichbar.

Die Neigungssensoren werden am Löffel, am Stiel, am Ausleger und am Wagen montiert, damit der Löffel in jeder Lage steuerbar ist.
Oberbauleiter Martin Meier skizziert die Maßnahme: „Das Ziel ist, das Tidefenster von fünf auf acht Stunden zu erhöhen und zu garantieren, dass Motorboote, Mini-Segler und Barkassen mit einem Tiefgang von 1,20 m nach erfolgreicher Ausbaggerung bei mittlerem Tidehochwassser gute 2 m Wasser unter dem Kiel haben“.
 Die Neigungssensoren werden am Löffel, am Stiel, am Ausleger und am Wagen montiert, damit der Löffel in jeder Lage steuerbar ist.
Die Neigungssensoren werden am Löffel, am Stiel, am Ausleger und am Wagen montiert, damit der Löffel in jeder Lage steuerbar ist.
Für eine präzise Ausbaggerung wurden vor der Baumaßnahme die wichtigen Parameter wie Höhe, Tiefe und Lage definiert (Soll-Daten) und vom zu bearbeitenden Untergrund (Ist-Daten) ein 3D-Modell erstellt. Diese Ist-Daten hat das Unternehmen Matthäi Wasserbau mit einem Peilboot samt Fächerecholot gesammelt. Im nächsten Schritt werden diese 3D-Daten über die offene Schnittstelle auf die Baggersteuerung X-53i übertragen. Prinzipiell sind alle Topcon-Systeme mit offenen Schnittstellen designt, damit der Datenfluss sowohl zwischen Topcon-Systemen als auch zwischen Systemen anderer Hersteller garantiert ist.
 Jede Löffelbewegung kann auf dem Display der Baggersteuerung in Echtzeit verfolgt werden.
Jede Löffelbewegung kann auf dem Display der Baggersteuerung in Echtzeit verfolgt werden.
Im Fall der Flussbettausbaggerung bildet das Display dann sowohl die Soll- als auch die Ist-Linie des Flussgrunds ab. „Sobald wir wissen, wie es unten im Wasser aussieht und wir unser Soll-Modell haben, können wir mit dem Schwimmbagger loslegen. Natürlich wird während der gesamten Maßnahme die Position des Baggers und natürlich auch des Baggerlöffels per GPS kontrolliert und mit dem Soll-Modell abgeglichen“, so Oberbauleiter Martin Meier von Matthäi Wasserbau. Dabei griffen die Spezialisten zum Abgleich auf Korrekturdaten von einer Topcon-Referenzstation zurück. „Letztlich wird also die genaue Löffelposition unter Wasser über mehrere Messdaten bestimmt, die miteinander verglichen werden. Dadurch können wir den Bagger exakt positionieren“, fasst Martin Meier den Ablauf zusammen.

Der Schwimmbagger der 40-Tonnen-Klasse ist mit der 3D-Baggersteuerung X-53i von Topcon ausgestattet.
Das 3D-Baggersystem X-53i von Topcon besteht aus mehreren Komponenten: Direkt in der Fahrerkabine ist das große Farbdisplay mit Touchscreen angebracht, so dass der Baggerführer jederzeit jede Löffelbewegung in Echtzeit im Blick hat. Die dafür notwendigen Signale werden im GNSS-Empfänger MC-i4 verarbeitet, der ebenfalls direkt in der Kabine montiert wird. Die Neigungssensoren TS-i3 sind für höchstmögliche Präzision am Löffel, am Stiel, am Ausleger und auch am Wagen angebracht, damit die Löffelbewegungen mit maximaler Präzision dargestellt werden.

Auf einer Länge von 700 m wird das Flussbett der Este und des Hafens in Buxtehude tiefergelegt.
Der Schwimmbagger wird an den Anfangspunkt manövriert und platziert seinen Pumpkopf dank der 3D-Steuerung genau an der richtigen Stelle. Aufgrund der Vermessungsdaten des Wasserstraßen- und Schifffahrtsamts Hamburg, sowie die durch das Peilboot selbst generierten Daten, ist diese Position genau bekannt. Dazu der Mitarbeiter René Hackbarth: „Insgesamt sind es gut 6.000 m3 Sediment, die der Bagger lösen muss. Die Pumpen befördern dieses Sediment über eine schwimmende Leitung von bis zu 400 m Länge zum Betriebshafen. Doch dort muss das Sediment weiter bearbeitet werden – wir setzen zu diesem Zweck ein spezielles Flockungshilfsmittel zur Entwässerung ein. Anschließend landet das Gemisch aus Wasser, Schlamm und Sediment in geotextilen Kunststoffsäcken und findet seinen Weg in Entwässerungsschläuche. Wenn der Inhalt der Entwässerungsschläuche dann die Flüssigkeit verloren hat, kann der Rest dann in LKW verladen und entsorgt werden“.
 Insgesamt fördert der Schwimmbagger bis zu 6.000 m3 Sediment aus der Este.
Insgesamt fördert der Schwimmbagger bis zu 6.000 m3 Sediment aus der Este.
Für punktgenaues Arbeiten braucht der Schwimmbagger natürlich eine stabile und exakte Position. Das wird durch hydraulisch ausfahrbare Stützen unter den Pontons erreicht. Sobald der Bagger sicher positioniert ist, startet das Team die Baggersteuerung und wenige Augenblicke später kann es mit dem Ausbaggern losgehen. Und einmal in Betrieb genommen überzeugt die 3D-Steuerung X-53i durch ihre Zuverlässigkeit: „Wenn das Topcon-System einmal initialisiert ist, läuft es extrem schnell und lässt sich so leicht nicht aus der Funktion bringen“, weiß René Hackbarth.
Beim Ausbaggern arbeitet der Schwimmbagger mit einer Schneidkopfsaugpumpe. Zur Unterstützung ist der Bautrupp von Matthäi Wasserbau zusätzlich mit einem Peilboot samt Echolot immer wieder in der Nähe des Baggers und überprüft die wichtigsten Parameter wie Höhe, Tiefe und Lage. Durch das vorher erstellte 3D-Modell weiß der Baggerführer stets genau, wieviel Sediment an welcher Stelle ausgebaggert werden muss. Durch den kontinuierlichen Abgleich zwischen den, durch die Steuerung gesammelten Daten und den Daten des Referenzpunkts, ist das Team um Oberbauleiter Martin Meier stets auf der sicheren Seite.
Und das funktioniert reibungslos, wie Martin Meier zu berichten weiß: „Sobald der Bagger mit der Schneidsaugkopfpumpe auf die definierte Solltiefe trifft, sind wir auf der sicheren Seite. Überhaupt sind wir mit dem Topcon-System sehr zufrieden. Meine Mitarbeiter sind mit der 3D-Technologie grundsätzlich vertraut, so dass alle Beteiligten sofort und problemlos mit der X-53i-Steuerung zurecht kamen. Und im täglichen Arbeitsablauf zeigt sich, wie sinnvoll der Einsatz eines solchen Systems ist. Wir sparen damit aufwändige Nachmessungen ein und können am Ende des Projekts ein absolut präzises Ergebnis vorlegen – und dank des von der Steuerung erstellten Ist-Modells auch immer den Nachweis für saubere Arbeit liefern“.
So kann das Unternehmen Matthäi Wasserbau am Ende der Ausbaggerungsmaßnahmen seinem Auftraggeber ein perfektes und präzises Ergebnis präsentieren – und die Segler, Wassersportler und Touristen freuen sich über große Segelschiffe und Traditionsbarkassen auf der Este und im Buxtehuder Hafen.
Weitere Informationen: Topcon Deutschland Positioning GmbH | © Fotos: Topcon
Diskutiere mit!
Du kannst jetzt antworten und Dich später anmelden. Wenn du bereits einen Account hast kannst du dich hier anmelden.
Note: Your post will require moderator approval before it will be visible.